FPV Drones
By: G | Published: 2025-06-10I started to get into flying drones in highschool. When I got my first drone I couldn't figure out how to get the controller to pair with the receiver. So the drone sat in my closet for a few years. After graduating college and having more time I picked it back up and figured out how to get them connected. I started with a pre made drone from eachine and a flysky fs-i6x controller.
I ended up crashing the drone immediately and found out that a big part of this hobby is that you can typically spend more time fixing than flying. As I broke and fixed the drone I started to learn how all the parts work together and how to solder them together. My first solder attempts were bad.
With practice my soldering skills got better.
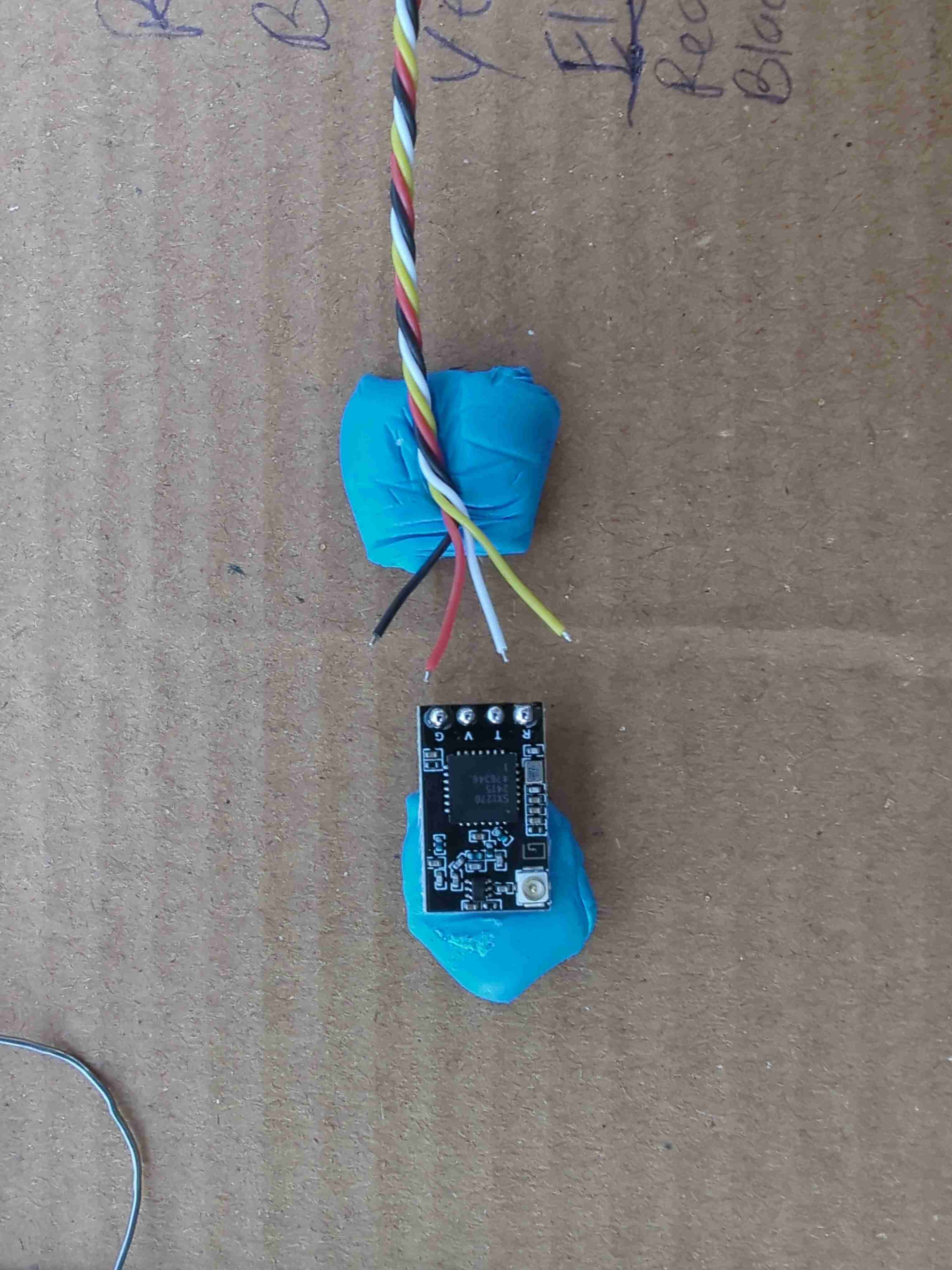
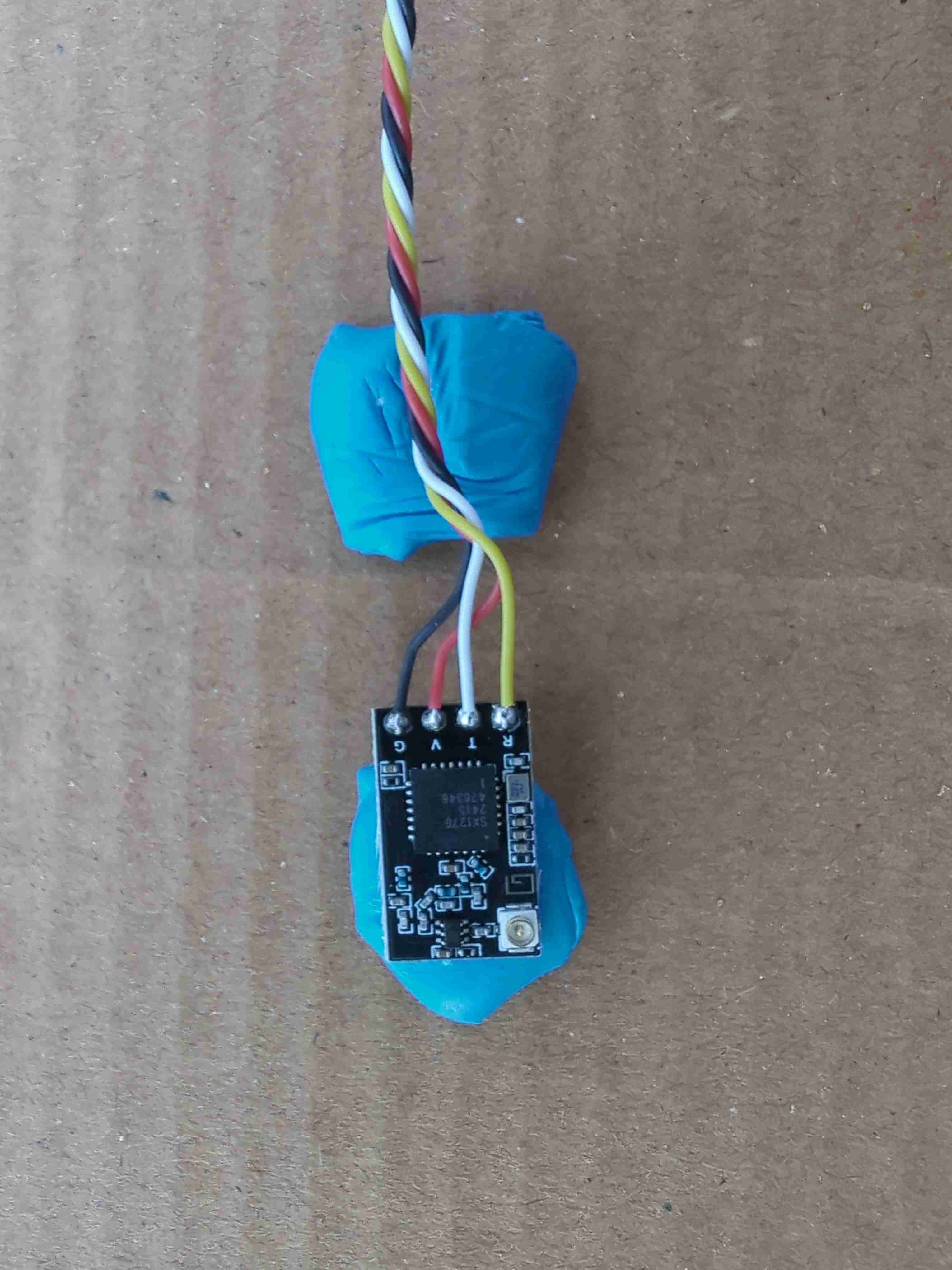
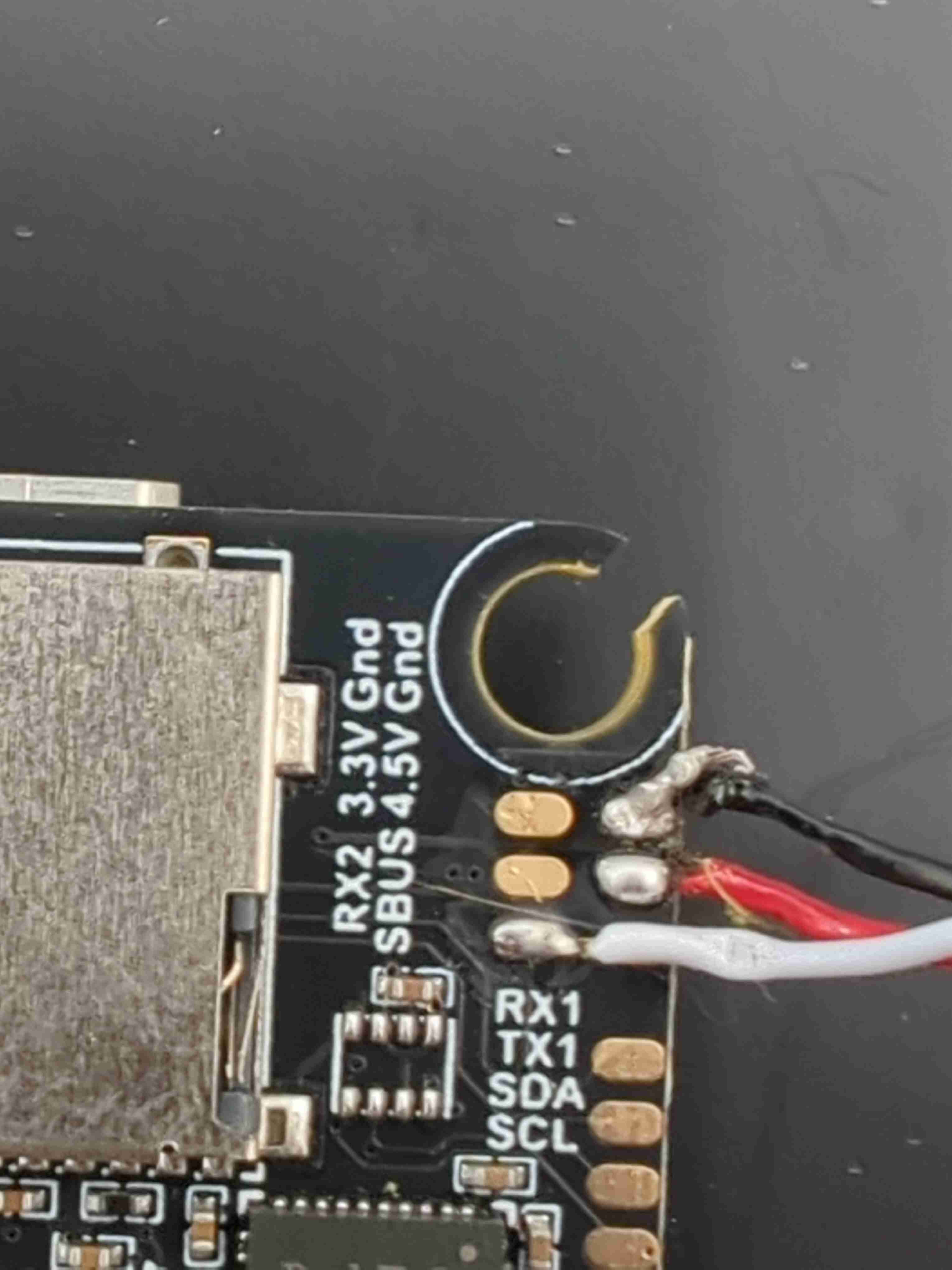
After a while I started to outgrow the range of the flysky controller. I would constantly have moments where the drone would lose connection and fall out of the sky. After some research it seemed like the preferred radio protocol was ELRS. My flysky controller is not compatible with ELRS and buying a new controller could have been 250-400$. I ended up finding a community of people who have made custom firmware for the flysky fs-16x to make it compatible with ELRS. (https://github.com/OpenI6X/opentx/wiki/Flashing-&-Upgrading) And found this youtube video: https://www.youtube.com/watch?v=dkHXLw7T87s With these two resources I was able to get it all to work. All I needed to do was get an ELRS module and solder the connection wires to the board.
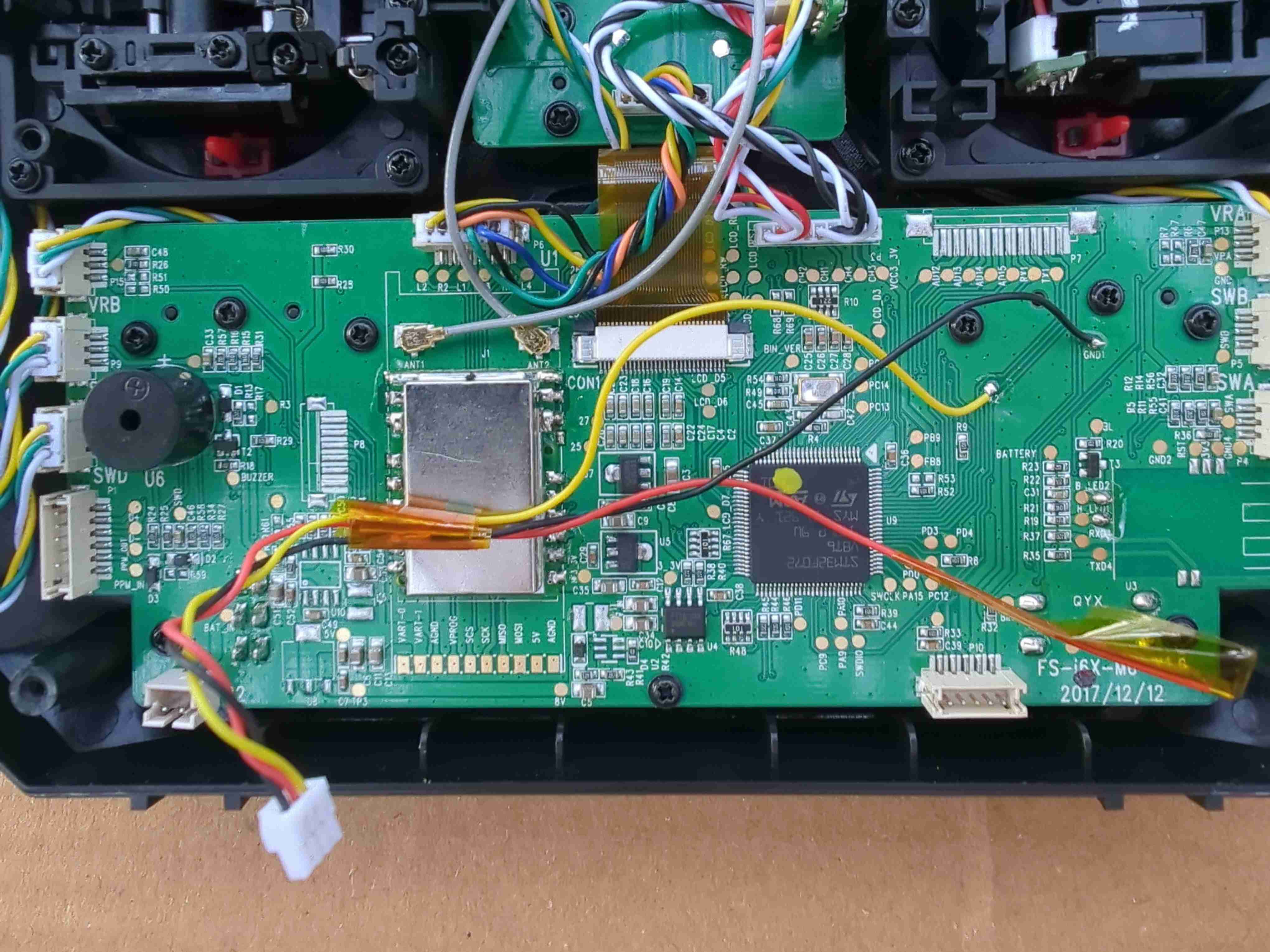
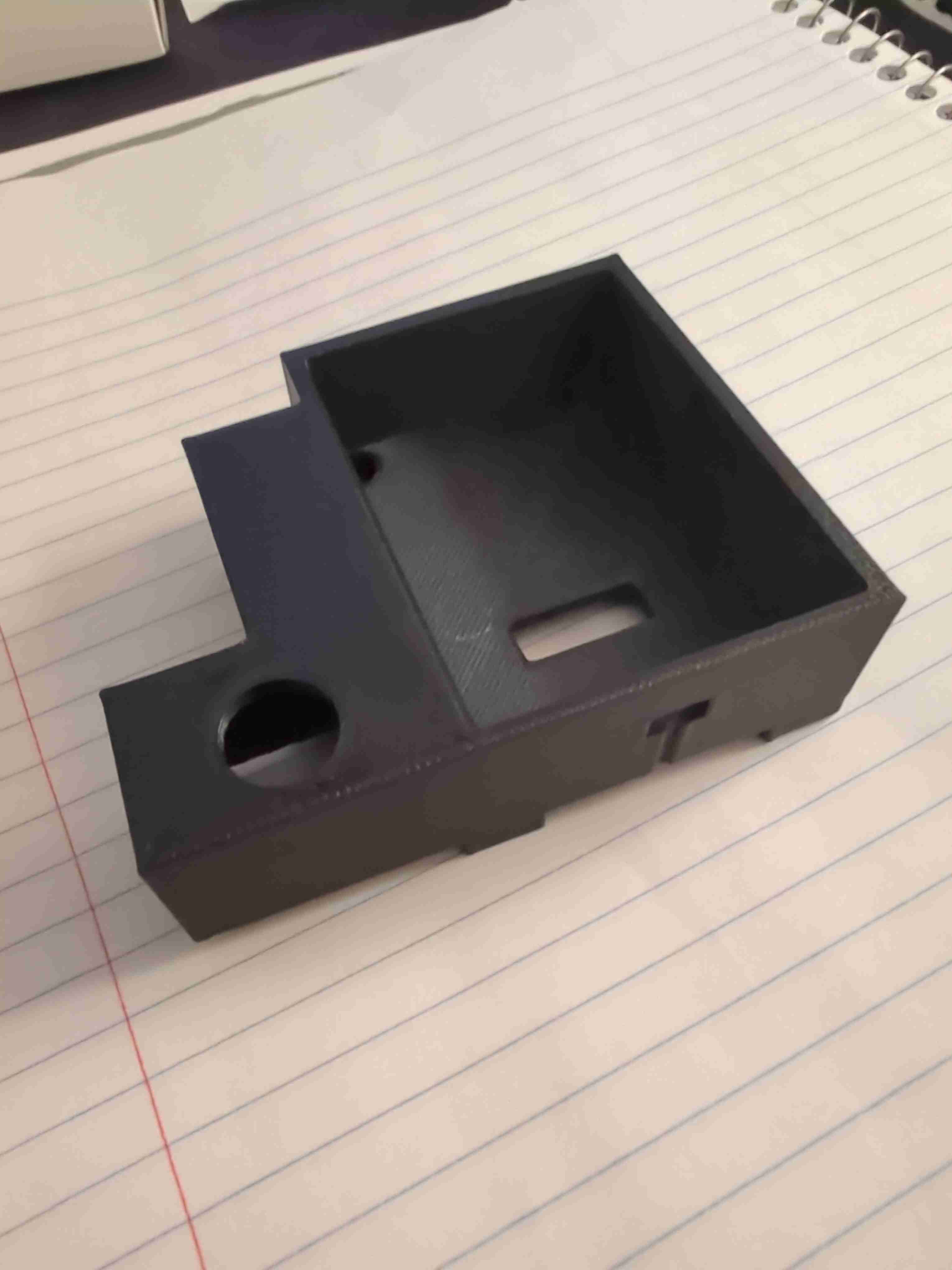
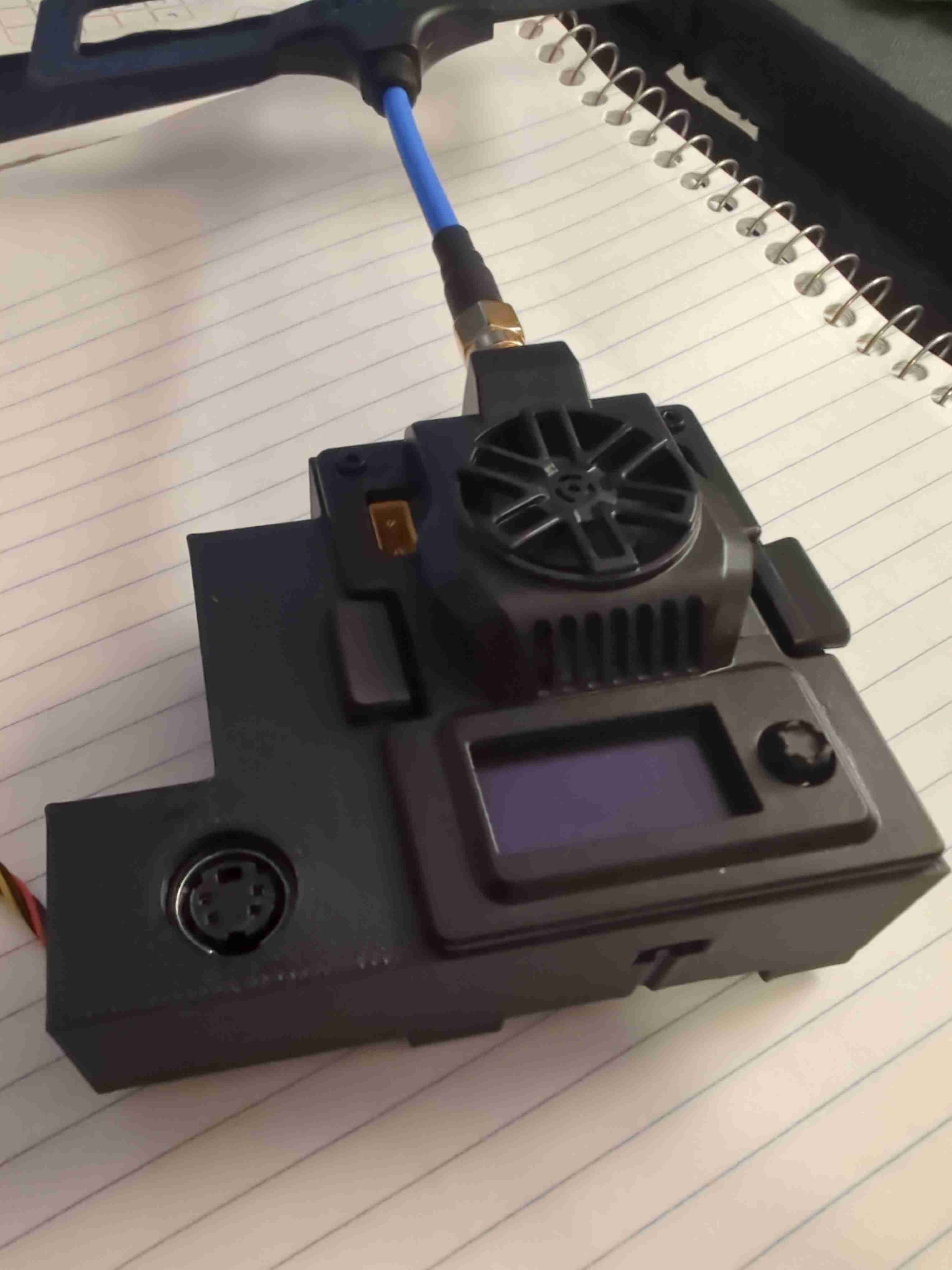
This all worked together but then I needed to mount the ELRS module to the back of the controller, so I 3d printed a custom mount so I could mount the module while also keeping the capability of connecting the controller to a computer.

After a while the drones were all set and I had even made a case to carry them around in with all of my tools. The next goal is to figure out how to connect the gps module to the flight controller so the next time I lose connection I don't have to climb a mountain and fish it out of a tree :)

